

Real-time, handheld 3D radiometrics
Is this your challenge?

From operation to decommissioning and dismantling, knowing the radiological state of a nuclear site is essential. It will drive the different activities and strategies. However, running radiological surveys is a task that requires a lot of time and labour, and can put workers at risk of exposure to radiation.
Over the last few decades, radiometric systems have drastically improved, with reduced size, better portability, better precisions, etc. Ultimately, it makes the life of onsite workers easier, allowing them to get a better understanding of the state of a facility prior to doing a job. In parallel, the rise of 3D imaging through LIDAR has also drastically improved, opening the door to precise models of large facilities.
For the past few years, instrumentation developers have started focussing on devices combining radiometric data and 3D visualisation. Overlayed, the combined output offers a much easier way for onsite team to locate source terms.
However, the downside of precise 3D radiometrics is often the need for data post processing and therefore the impossibility to have a real time 3D visualisation. At best, existing real-time handheld systems show the source terms on a 2D visual.
Imagine the added value a device able to offer a real-time 3D visualisation would bring to your EHS&Q team. This would be a great way to optimise screening and inspection across nuclear buildings while being simple to use even in a controlled zone.
inTechBrew’s insight

Originally, the LAMP 3D radiation mapping technology was developed by Gamma Reality Inc.’s founding team while they were working as researchers at a Department of Energy (US DOE) national laboratory.
This feedback inspired them to establish GRI in 2018, a US company based in California, with the mission to make the powerful real-time 3D radiation mapping, data fusion, and visualisation technologies commercially available. Their unique selling point compared to other radiometric player is their handheld, real-time 3D radiation mapping without any post processing need. This is a great tool for onsite workers with the need to inspection or screening on the go.

LAMP is actually is suite of products made of two devices:
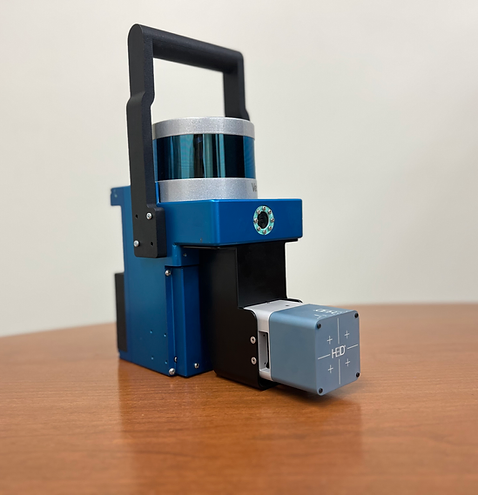
- LAMP-Imager: With a CZT from H3D inc. it offers a high-resolution gamma ray detector overlayed with a 3D cloud points;
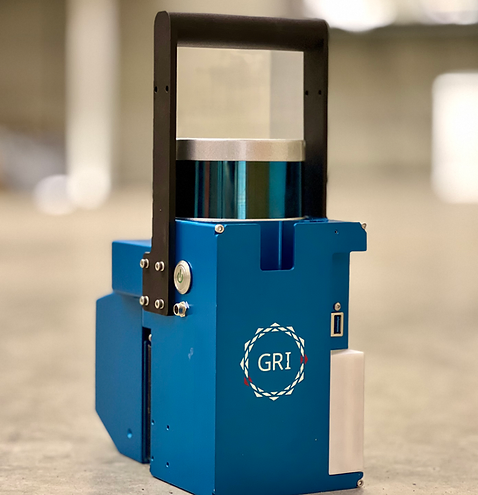
- LAMP-Mapper: With a CLLBC material, it overlays the radiometric data on a 3D point cloud.
Either device can display data on a 3D point cloud generated by the system or on a GPS map and are thus perfect tools to mount on a UAS or ground robot. The LAMP-Imager is optimised for precise source localisation, while the LAMP-Mapper is optimised for more sensitivity to lower activities and neutron mapping.
At inTechBrew, we like this technology because it is so user-friendly and can be used on the go to get you the information in real time without processing. It focuses on what you need: data fusion on the shop-floor!
User case 1: Decontamination efficiency
Validation of ultrasonic decontamination
LaSalle Power Station, IL, USA – 2021
As part of a pilot pipe cleaning demonstration, LAMP was trialled and tested in combination with an ultrasonic decontamination system. The objective of this demonstration was to show its capabilities to collect & show radiometric data in real-time to the worker in the controlled zone. Here, three dedicated cleaning stations were designated on a section of pipework. Each stations applied a three-steps approach:
– A pre-cleaning scan of the pipe in the rad waste pipe aisle room by LAMP;
– A cleaning using the decontamination tool;
– A subsequent scan at each cleaning station.
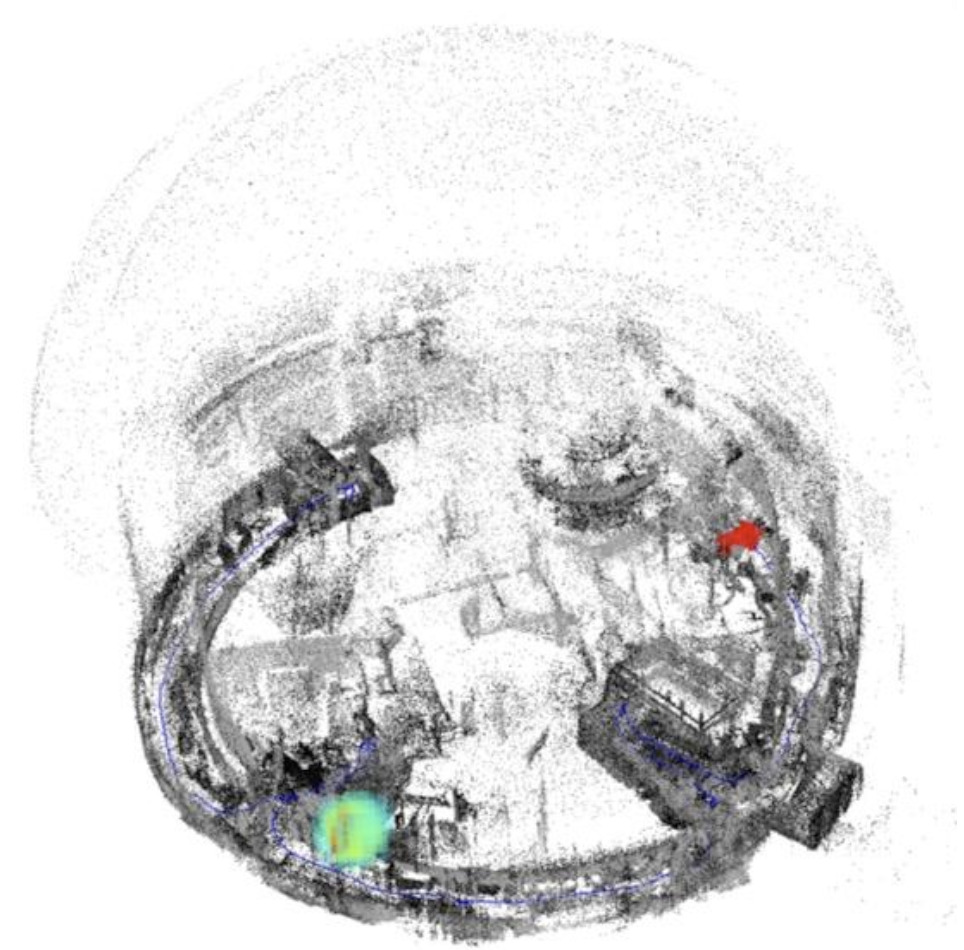
For each station along the pipe, decontamination was done for 15 minutes. Each LAMP scan took less than five minutes, with most scans taking about two minutes. The site worker simply walked back and forth along the pipe once with LAMP to generate each 3D scan in real-time without postprocessing on the control tablet’s user interface.
These real-time 3D scans provided visual confirmation of the ultrasonic cleaner’s decontamination factor in reducing the source term on the pipe. The radiation protection team had immediate access to this information, which did not require any additional post-processing or analysis to provide actionable insights to drive decisions.
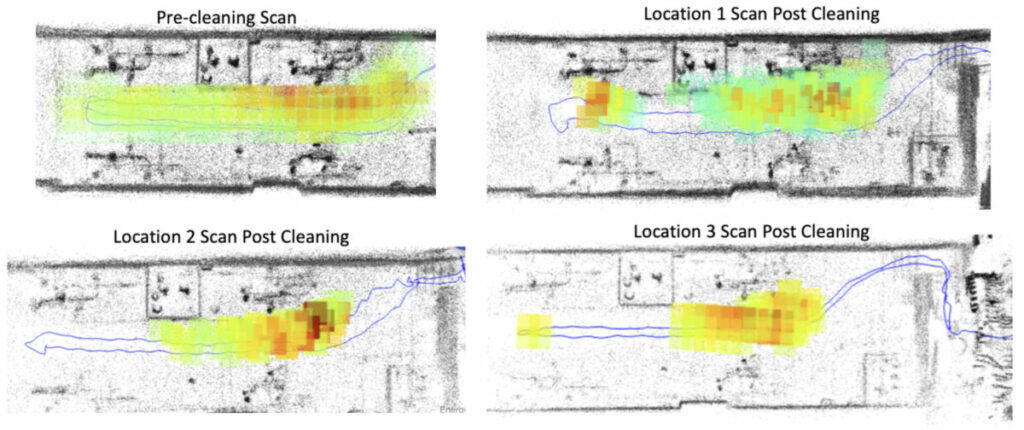
Furthermore, full-resolution 3D LiDAR scans with fused radiation data are available to download and view with point cloud viewing software after a measurement. The radiation data is displayed in colour, with higher levels of the source term represented by red and yellow colours.
User case 2: Spent fuel mapping
Neutron & Gamma mapping for spent fuel with a Spot robot
Surry Power Station, VA, USA – 2022
During spent fuel loading and unloading operations at an Independent Spent Fuel Storage Installation (ISFSI), the LAMP-Mapper version equipped with dual neutron and gamma-ray detection capabilities was deployed on their Spot robot. The person operating the robot was able to stay at a safe distance while LAMP and Spot walked around the fuel as it was being moved and showed the results in real-time without postprocessing.
A single scan around the ISFSI was performed by the LAMP-Mapper system, generating both the gamma-ray and neutron maps. As seen below, it is important to note that the neutron map appears to be more diffuse compared to the gamma-ray map, which can be attributed to the additional scattering experienced by neutrons in the environment.
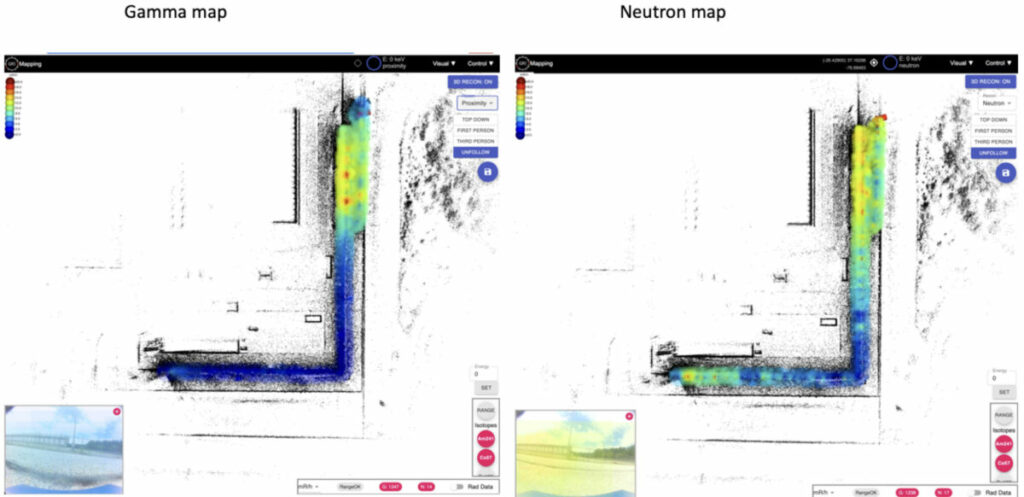
The LAMP-Mapper on the Spot robot provided a safe and efficient means of mapping radiation during spent fuel loading and unloading operations. The real-time 3D mapping and visualisation of the radiation data provided by LAMP-Mapper allowed for quick identification of any potential hot spots or radiation anomalies during operations.

User case 3
Mapping radiation from a UAS – Gamma Reality Inc.
USA – 2022

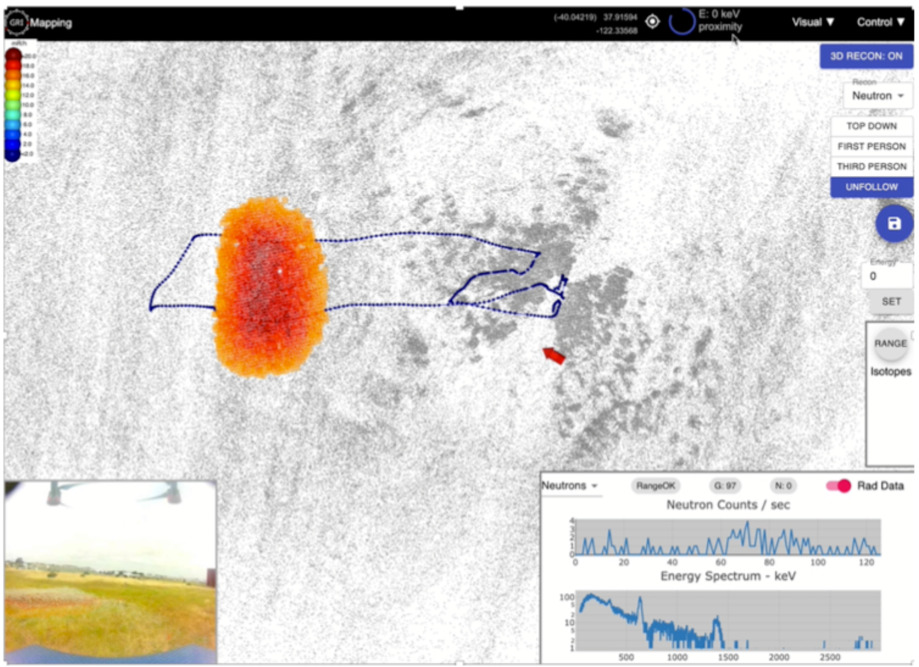
LAMP technology offers a unique advantage in outdoor aerial measurements when deployed on unmanned aerial systems (UAS). This allows for programmed automated flight paths over large areas, making it possible to conduct radiation mapping over a wide range of terrain. An innovative UAS-LAMP system could be especially useful in emergency response situations where nuclear facilities are involved in radiological releases.
Currently, such situations require emergency response teams to send personnel in vehicles to assess the situation by driving around the outside of the plant.
However, with a UAS-LAMP system, fast assessment can be made without potentially endangering human lives. Additionally, a UAS-LAMP system can cover more area more quickly than a manned vehicle, saving valuable time during an emergency response.
This is why a demonstration was performed with a UAS to prove the effectiveness of the system. A neutron source was located outside and as seen below; the UAS-LAMP system was able to identify it.
On the bottom left of the screenshot, it is possible to see distribution of radiation overlayed on the video stream.
User case 4: Wall scanning
Autonomous robotic wall scanning for Decommissioning – EPRI
Palo Alto, CA – USA 2022
GRI showcased an autonomous robotic wall scanning system prototype, based on a ClearPath Husky UGV which was equipped with a custom scissor lift and a LAMP system with a 4 x 4” NaI detector.
The demonstration involved placing sources on a 10-meter long, 3-meter-high wall that was outlined with 1-meter squares, simulating a wall to characterise within a decommissioning nuclear building. The LAMP system was utilised to control the scissor lift and autonomously drive the UGV, allowing for a quick scan of a large vertical surface.
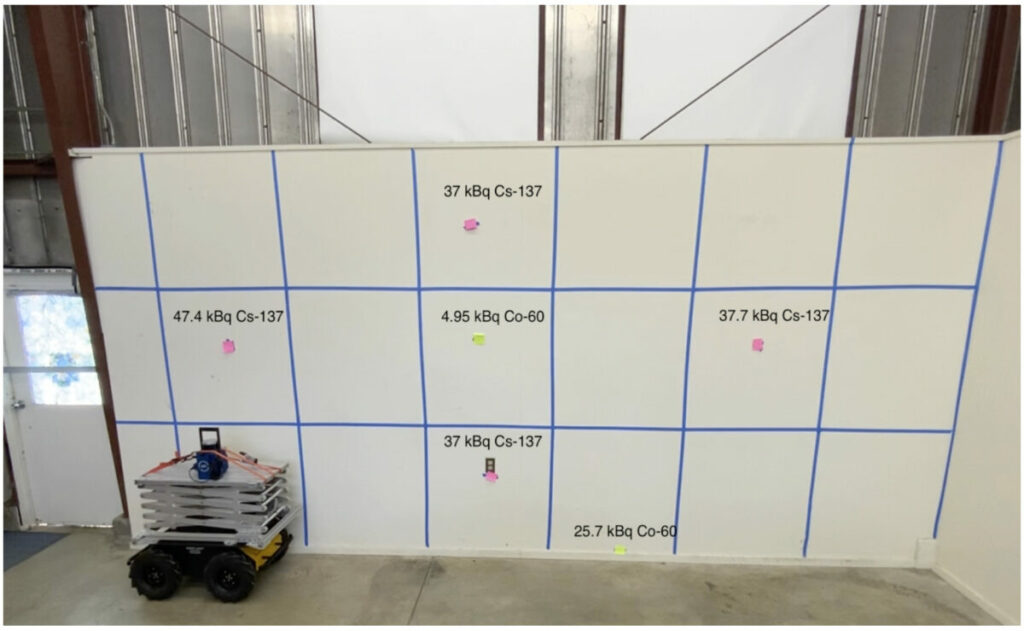
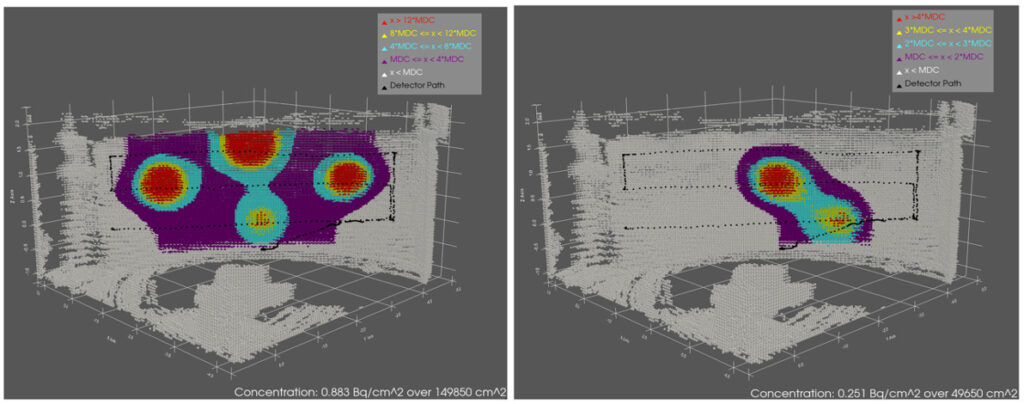
The results of the scan can be seen below, where Cs-137 and Co-60 sources were located on the scanned wall and used as source terms. This robotic system demonstrates the potential for LAMP to be integrated with autonomous technology to enable efficient and safe radiation detection in a decommissioning nuclear facility environment. The outputs are colour coded according to regulatory release limits.
The technology: LAMP
The LAMP system merges 3D LiDAR scans with radiation data to generate user-friendly 3D radiation maps that locate and identify source terms within the operating environment. That’s what we call data fusion. Moreover, the system can operate in GPS mode to geolocate source terms on a global/satellite map. It is designed to be easy to use and provides instant, practical information in the field by streaming 3D maps to a user control tablet in real-time while the system moves through the environment. The LAMP system produces fused 3D radiation maps quickly, updating them as more data is collected, and can map large areas within a few tens of minutes.
Depending on the application, there are two different versions of LAMP:
- LAMP-Imager, which features high resolution 3D gamma-ray imaging. It features an H3D CZT detector;
- LAMP-Mapper, which provides both gamma and neutron mapping. It features CLLBC detection material, enabling simultaneous neutron and gamma-ray detection.
The key features of LAMP include:
Real-time results in the field: Fused 3D LiDAR radiation map and other critical data, including isotope ID & dose rate; LAMP provides results in real-time in the field, including a fused 3D LiDAR radiation map and other critical data, including isotope ID & dose rate. This real-time, actionable data informs rapid decision making in the field, with no additional desktop data processing required to get the information you need. Real-time data is streamed to the control tablet and displayed in GRI’s intuitive user interface.
Fast mapping of large areas: Fully mobile system and can map a large in minutes. For instance, an entire reactor building basement floor and multiple hotspots can be mapped in a ten-minute walking measurement. Unlike stationary detectors, which can require multiple measurements and take a long time to find sources, GRI’s LAMP system is fully mobile and can map large areas in minutes. LAMP localizes sources automatically while simultaneously mapping the operating environment, and the 3D map and radiation data update as more data is collected. The result shown is an entire reactor refuelling floor with multiple hotspots mapped in a ten-minute walking measurement.
Flexible deployment: It can be integrated on a wide range of aerial / ground platforms. The LAMP system can be deployed on unmanned ground robots, drones, vehicles, and in handheld mode. It can even be easily deployed in multiple modes in the same day or area to support dynamic missions, including emergency response. Simply attach or detach LAMP using specially designed mounts to your robot, drone, vehicle, or person, and continue mapping. LAMP’s deployment flexibility enables safer and dynamic ways to assess and identify radiological hazard
Visualise dose rates: They are shown in real-time in the user-interface. LAMP also visualizes dose rates in real-time in the user interface. These dose rates indicate dose measured along the system path (e.g. where LAMP travelled in the operating environment).
Map indoors and outdoors: Can map multiple levels of a building in 3D and outdoor the mapped areas can be large – 0.5 km2. LAMP can be used to map radiological sources, including point sources and distributed contamination, in both indoor and outdoor environments. Indoors, LAMP can map multiple levels of a building in 3D.
High resolution 3D maps: High resolution point clouds automatically fused with radiation data. In addition to real-time 3D radiation maps, LAMP also produces high resolution LiDAR point clouds automatically fused with radiation data. These highly detailed maps provide another way to visualize fixed infrastructure, equipment, and other objects, such as pipes, barrels, or instruments, in the work area. These intuitive 3D maps can be used for work planning and pre-job briefings.
The main specifications for both LAMP versions are:
- Real-time 3D SLAM mapping and data streamed to the control tablet;
- Swappable batteries – each battery lasts 2.5 hours of active mapping;
- Data is processed and stored onboard LAMP;
- No prior information of area or extra equipment required;
- Radiation data provided:
- Isotope identification;
- Spectroscopy;
- Dose rate;
- Count rate;
- 3D Isotope-specific radiation maps.
- Friendly user interface for control and visualisation;
- Minimal training required;
- Deployable on mobile platforms;2TB onboard storage;
- Connectivity between the detector and the user interface: WiFi or wired connection;
- Environmentally sealed to prevent water intrusion and IP65;
- Operates from -40°C to 50°C;
- Multiple LAMPs used can create a single combined map;
Each version has some specific characteristics of their own:
| LAMP-Mapper | LAMP-Imager | |
| Weight | 4.3kg | 4.5kg |
| Dimensions | 20.3 (L) x 11.43 (W) x 31.75 (H) cm | 24 (L) x 12 (W) x 31.75 (H) cm |
| Radiation detector | 32.8 cm3 CLLBC crystal with <3.7% energy resolution at 662 keV, sensitivity and discrimination of gamma-rays and neutrons | >19 cm3 CdZnTe Gamma-ray Imager from H3D with ≤1.1% FWHM at 662 keVModel: H3D M400i |
| Radiation mapping resolution | ~1 m spatial radiation mapping resolution @ 1 mPerforms proximity mapping | ~0.1 m spatial radiation mapping resolution @ 1 mPerforms Compton imaging |
In terms of visualisation, LAMP also provides two options:
- LIDAR mapping, which is the default mode. The device automatically overlays the 3D scan and the radiation data, allowing the operator to clearly see the source terms. It has been tested both indoor and outdoor from small objects like pipes or containers all the way to ISO freight containers;
- GPS mapping. LAMP automatically puts on a GPS map the source terms with also the GPS coordinates, helping the user to locate source terms from a UAS for instance. It also has an augmented reality view overlaying radiations on a live video stream.

This versatile technology and applicable to many different scenarios bring the following benefits:
- Faster surveying both indoor and outdoor;
- Real-time information, without a post processing stage, allowing for fast decision making in the field;
- The overlay of 3D LIDAR and radiation data drastically helps the user to localise source terms in an operating environment;
- Easy integration on mobile platforms such as UAS or ground systems allows for automatic characterisation, saving time and allowing RP workers to focus on adding value activities;
- The simplicity of the user interface allows its use and deployment in many scenarios and its output can be used for work planning or pre/post job briefings.
Any questions ? Interested in another innovative real-time, handheld 3D radiometrics ? Do not hesitate to contact us directly, we will help you find a fit-for-purpose, cost-efficient enhanced real-time, handheld 3D radiometrics to answer your challenge.
Erika SUZUKI
Head of Business Development
Gamma Reality Inc.
1301 S. 46th street
Richmond, CA 94804, USA
E-mail: esuzuki@gammareality.com
Website: www.gammareality.com
