

Slender snake-like robot for remote applications
Is this your challenge?
The maintenance, inspection and repair of components in a nuclear setting is often limited by constrained access and intricate geometries. Borescopes can be used in some cases and can reach several meters, but the lack of control over the tool’s shape makes the procedure slow or near impossible when navigating an extremely cluttered environment. This significant limitation drastically restricts the efficiency of a borescope option. With an uncomplete inspection or if damage is detected, components might therefore need to be disassembled, leading to long downtimes.
Now imagine if an engineer could inspect and repair a pipe deep within the intricate geometries of aeroengines, power plants or similar environments. Imagine going deep within a nuclear reactor without having to get changed into a Hazmat suit, or even perform that inspection or that repair from the comfort of your own home. Would you say no robot has acquired that level of shape control? Is this the stuff of science fiction?
Not anymore. Here is a novel teleoperated solution that can outperform borescopes and will enable maintenance and repair tasks to be undertaken in extreme environments without compromising the health and safety of the operators.
inTechBrew’s insight
Robotic systems for in-situ repair is one of the research areas at the University of Nottingham (UK). Since 2018, the Machining and Condition Monitoring team has been focusing on the development of novel miniaturised robotic systems for inspection, maintenance and repair operations in challenging environments such as nuclear and aero-engines. The COBRA is their state-of-the-art robot for inspection and maintenance in hard-to-reach areas.

Importantly, unlike other hyper-redundant cable driven robots, the COBRA hybrid continuum robot is constructed with multiple continuous sections capable of large bending angles (± 90° in arbitrary direction), enabling them to access into extremely confined spaces. These active segments differentiate the COBRA from endoscopic solutions or complex fully actuated continuum robots.
At inTechBrew, we think this outstanding solution is truly an amazing piece of technology. Thanks to an active shape control, the COBRA can outperform borescopes for short-range inspection as well as enable intervention. Just like the real reptiles, this 5m long, ultra-slender robot, which is only about the same thickness as a pencil (9mm in diameter), can easily slither through crammed spaces and round tight bends in safety-critical machine parts. All that using a gaming-like controller.
User case 1: Nuclear

Pipework Inspection – UKAEA
United Kingdom
- Pipeline inspection in nuclear power generation installation.
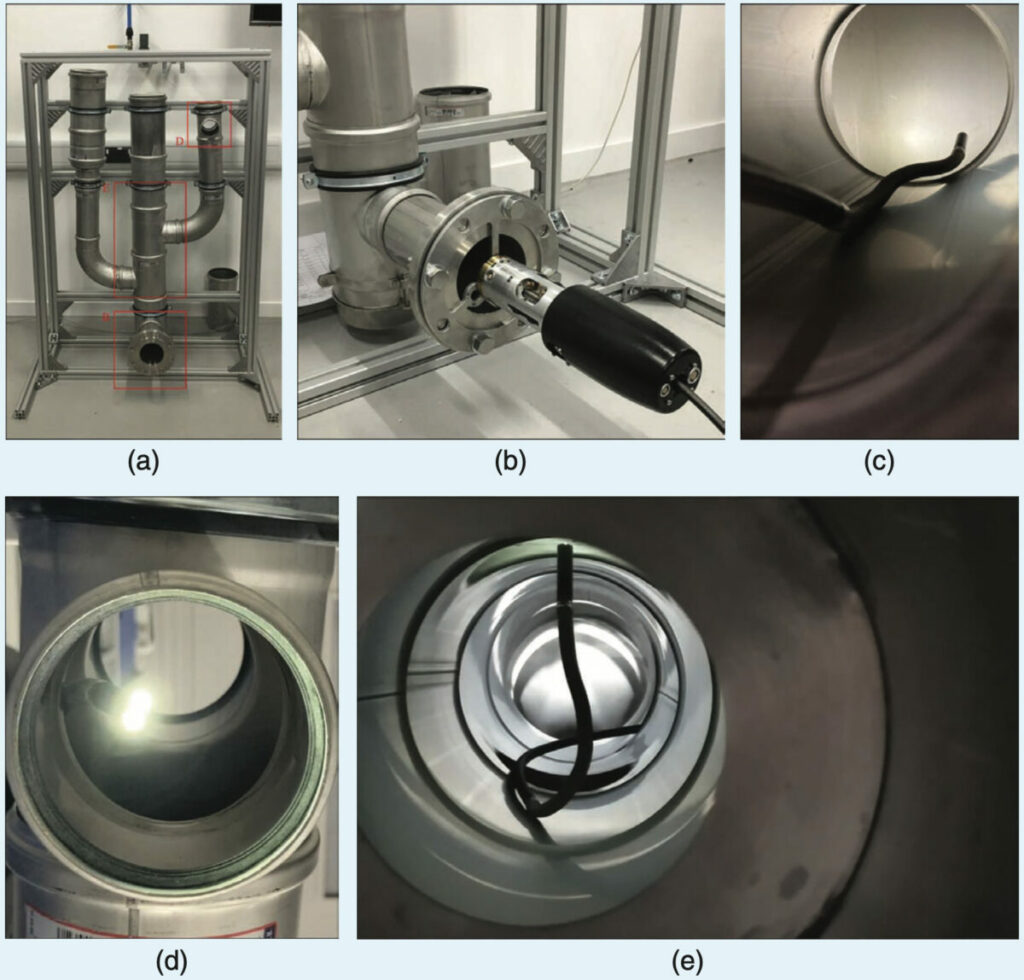
- Non-active – demonstration of capability on a vertical layout [Figure a].
- To begin with, the COBRA twist-and-feed mechanism is attached onto an opening [Figure b], then the COBRA is driven through the pipes [Figure c].
- Inspection of hard-to-reach areas: corners [Figure d] and pipe ceiling [Figure e]. The latter highlights the advantages of the COBRA active segment: a full tip bend around a corner while suspended. This cannot be achieved by a conventional borescope. Furthermore, a conventional borescope would not be able to lift its camera as in Figure e, consequently either not achieving full inspection or only giving distant visual feedback with limited information (i.e., a low-quality image or being out of range for depth measurement or intervention).
- At the same time, a fully actuated continuum robot might be hindered by the need to achieve follow-the-leader motion over a long reach within this target environment, thus leading to hybrid designs like COBRA as the only solution for such operations.
User case 2: Aerospace
Aircraft turbine engines inspection – Rolls Royce Aerospace
Rolls Royce University Technology Centre – United Kingdom
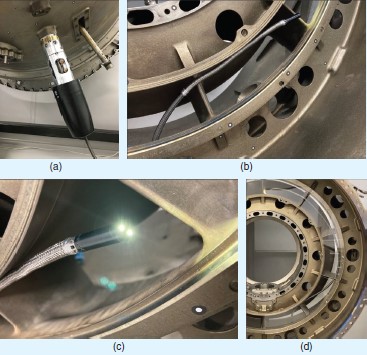
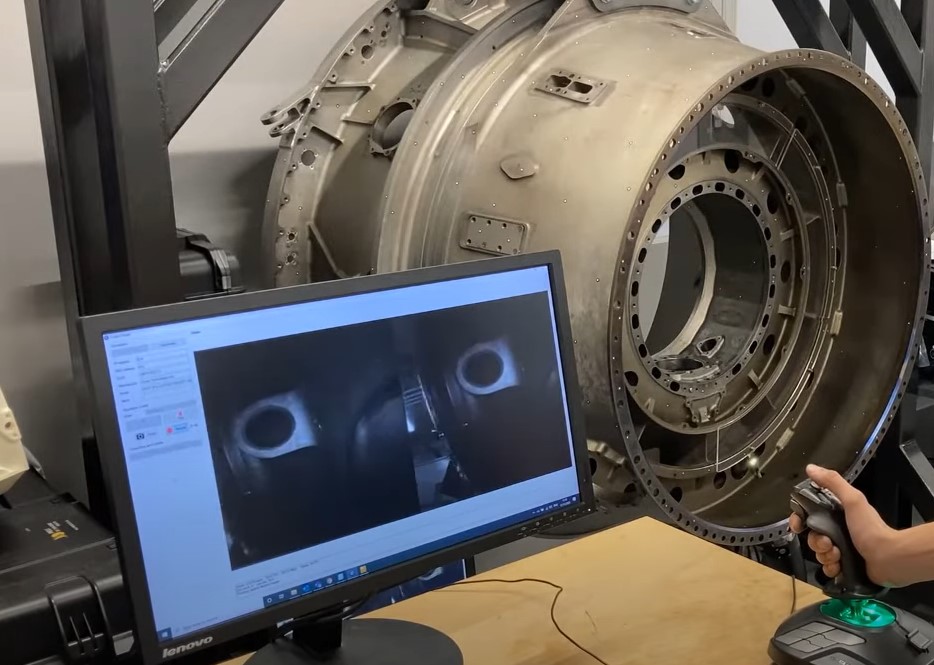
- Aircraft turbine engines represent one of the most challenging borescope inspection scenarios. Demonstration of capability on an unmounted engine layout [Figure a].
- With narrow access ports often on the order of 10 mm in diameter, a long reach tool of several meters is here required to perform a full inspection. With tortuous paths around the combustion chamber or turbine blades, this scenario requires high mobility, a long reach, and an operator able to drive the system along complex trajectories with only the feedback of the onboard camera.
- The added mobility of the COBRA active segment simplifies this operation in several stages, from the initial insertion with the twist-and-feed mechanism [Figure a], the COBRA is easily driven through the engine [Figure b].
- The LED lights at the tip of the camera probe [Figure c] ensure full functionality even in dark environments, ensuring to safely reach the final inspection [top of Figure d].
The technology: COBRA
The COBRA (Continuum Robot for Remote Applications) is a hybrid continuum robot. By combining design solutions from both borescope and continuum robot technologies, the COBRA can overcome many of the intrinsic limitations of those systems.
To understand the benefit the COBRA is offering, we need here to explain a bit about continuum robot. This is a type of robot that is characterised by infinite degrees of freedom and number of joints (hence the snake-like analogy). These characteristics allow continuum manipulators to adjust and modify their shape at any point along their length, granting them the possibility to work in confined spaces and complex environments where standard rigid-link robots cannot operate. That said, there is an inherent trade-off between continuous and discrete elements. For example, continuum structures can conform to their surroundings while discrete rigid links aid precise positioning. Here, the hybrid COBRA goes further and overcome the backbone length constraints of fully actuated continuum designs while not implementing rigid links.
COBRA’s design
The COBRA new design offers extraordinary manoeuvrability and responsiveness due to a series of tendons routed along the robot snake’s backbone. To overcome the limitations of both borescopes and fully actuated continuum robots, a modular design has been used for the COBRA, with both active tendon-driven and passively flexible segments.
Control over the passive segments is achieved with an external mechanism that controls the axial translation and rotation of the robot at the entrance of the target environment, emulating the manual action of a borescope operator. The active segment is controlled by an actuation unit that pulls and releases the tendons through rotary motors.
Forming a compliant structure of joints and multiple continuous sections enables it to bend at around 90° in any direction. When these tendons are pulled (by remote commands) it drives the bending motions, mimicking the range of movements of a human operator’s hands when handling the repair tools.
COBRA’s capabilities
Based on this novel compliant-joint structure, the COBRA can easily reach through crammed spaces and round tight bends in safety-critical machine parts. Its hollow interior, through which different tools or instruments can be fitted, allows the COBRA to deliver various end effectors (e.g., camera and machining tools) for conducting remotely driven operations.
To perform complex industrial repair, COBRA is currently equipped with a stereovision camera and a miniature cutting tool attached to the ‘head’ of the snake (an end-effector); however, other devices can be interchanged, depending on the task required.
COBRA is also easily operated remotely after only a few minutes of training via a controller (much like a large gaming joystick). This means maintenance engineers, based thousands of miles away, can guide COBRA via a computer screen as it navigates through complex layout deep inside engines or narrow pipe networks.
COBRA’s benefits
Successfully demonstrated in jet engine inspection and repair, as well as nuclear plant installation and maintenance, it is reaching commercial stage for aerospace and nuclear applications (currently TRL 6) and is even being now refined for medical use. A “disposable” version of COBRA for use in the decommissioning of nuclear plants is also being thought about to allow for inspection in heavily radioactively contaminated areas where, for safety, the robot could be considered to be left at the scene after use.As an important monitoring tool in safety-critical installations, the COBRA can reduce lifecycle costs, provide rapid worldwide operational response to issues, and improve the safety and quality of high value installed infrastructures. The COBRA will be long enough to be deployed in a range of pipe based nuclear fission and fusion scenarios. The flexibility and dexterity of the robot allow it to manoeuvre through complex and narrow pathways, while still maintaining precision and accuracy in its movements.
COBRA’s specifications
COBRA is a hybrid continuum robot with a design combines both active 6-DoF tendon-driven (enabling a fully controlled navigation through complex environments) and passively flexible segments (used to achieve a long reach) to overcome the limitations of both borescopes or fully actuated continuum robots. It achieves:
- High dexterity at a long reach (more than 5 m), it is modular so that it can be extended.
- A cross-section diameter of less than 9 mm (about the same thickness as a pencil) and can be tailored to 20mm if required.
- A modular actuation pack with a motor part for the tendon-driven segment and a separate mechanism to drive the passive parts to ensures enough DoF to deliver the COBRA to the target workspace.
- An intuitive and easy to pick up controller (much like a large gaming joystick).
- A user-friendly interface that significantly reduces the task complexity for operators.
- A set of abilities that has been demonstrated in two real case scenarios for nuclear and aerospace, in which a prototype of the proposed robot (5 m in length and fewer than 9 mm in diameter, with 6 DoF at the active segment and 2 DoF at the passive segment) outperformed both borescopes and continuum robots.
- The modularity of the novel design also allows for different configurations (e.g., multiple passive or active segments) to adapt COBRA for a large variety of other applications, such as surgical robotics, as highlighted in the reported medical application.
- A modular payload with the end effector which can be equipped with a laser ablation head (under development), camera, radiation sensor, lights. The 9 mm diameter COBRA can accept a payload of 75g.
Any questions ? Interested in another innovative snake-like robot ? Do not hesitate to contact us directly, we will help you find a fit-for-purpose, cost-efficient snake-like robot to answer your challenge.
Dr. Xin DONG
Faculty of Engineering
University of Nottingham
Jubilee Campus, Wollaston Road
Nottingham, NG8 1BB, UK
Phone: +44 115 84 66395
E-mail: xin.dong@nottingham.ac.uk
Website: www.nottingham.ac.uk/mcm
